能提前知道挥杆对不对吗?
核心问题
传统的挥杆分析都是事后诸葛亮 —— 挥完杆才告诉你哪里错了。
我们想做的是:在挥杆过程中就发现问题,立刻提醒。
这就像导航软件在你转错弯之前就喊"前方右转",而不是开过了才说"您已偏离路线"。
原理:身体的"多米诺骨牌"
好的挥杆有一个规律:力量像波浪一样,从身体中心向四肢传递。
正确顺序:髋部 → 躯干 → 肩膀 → 手臂 → 球杆
(先) (后)这叫做 运动链 (Kinetic Chain)。
如果顺序反了(手先动),就像用手臂甩球,力量小还容易受伤。
我们的想法:在三个关键位置贴传感器,检测"谁先动"。如果检测到手先动了,立刻震动提醒。
本次验证目标
这次实验是单元测试:分别验证每个传感器是否能正常工作。
还不是完整的挥杆测试(那需要三个传感器同时工作)。
测试设备
- 传感器:高精度运动传感器(包含加速度计和陀螺仪)
- 采样频率:每秒 100 次(人眨眼的时间内已记录 30 组数据)
测试位置
| 位置 | 作用 |
|---|---|
| 手部 | 检测手臂启动 |
| 下背 | 检测髋部旋转 |
| 上背 (T1 椎骨) | 检测肩部旋转 |
采集到的数据
数据规模
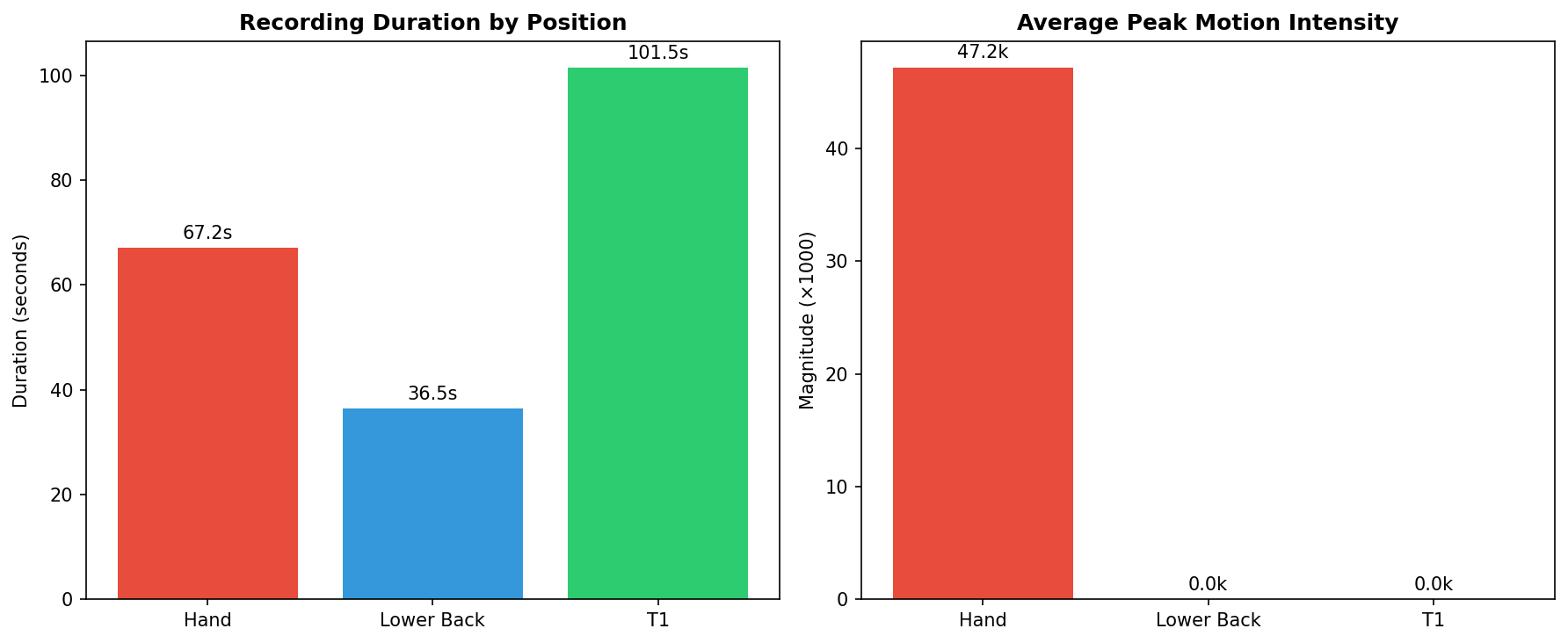
| 位置 | 文件数 | 总样本数 | 录制时长 |
|---|---|---|---|
| 手部 | 10 | 6,716 | 67.2 秒 |
| 下背 | 4 | 3,648 | 36.5 秒 |
| 上背 (T1) | 10 | 10,152 | 101.5 秒 |
总计:24 个文件,20,516 个样本,205.2 秒数据。
数据总览
原始传感器信号
下图是手部传感器在 5 秒内记录的原始数据:
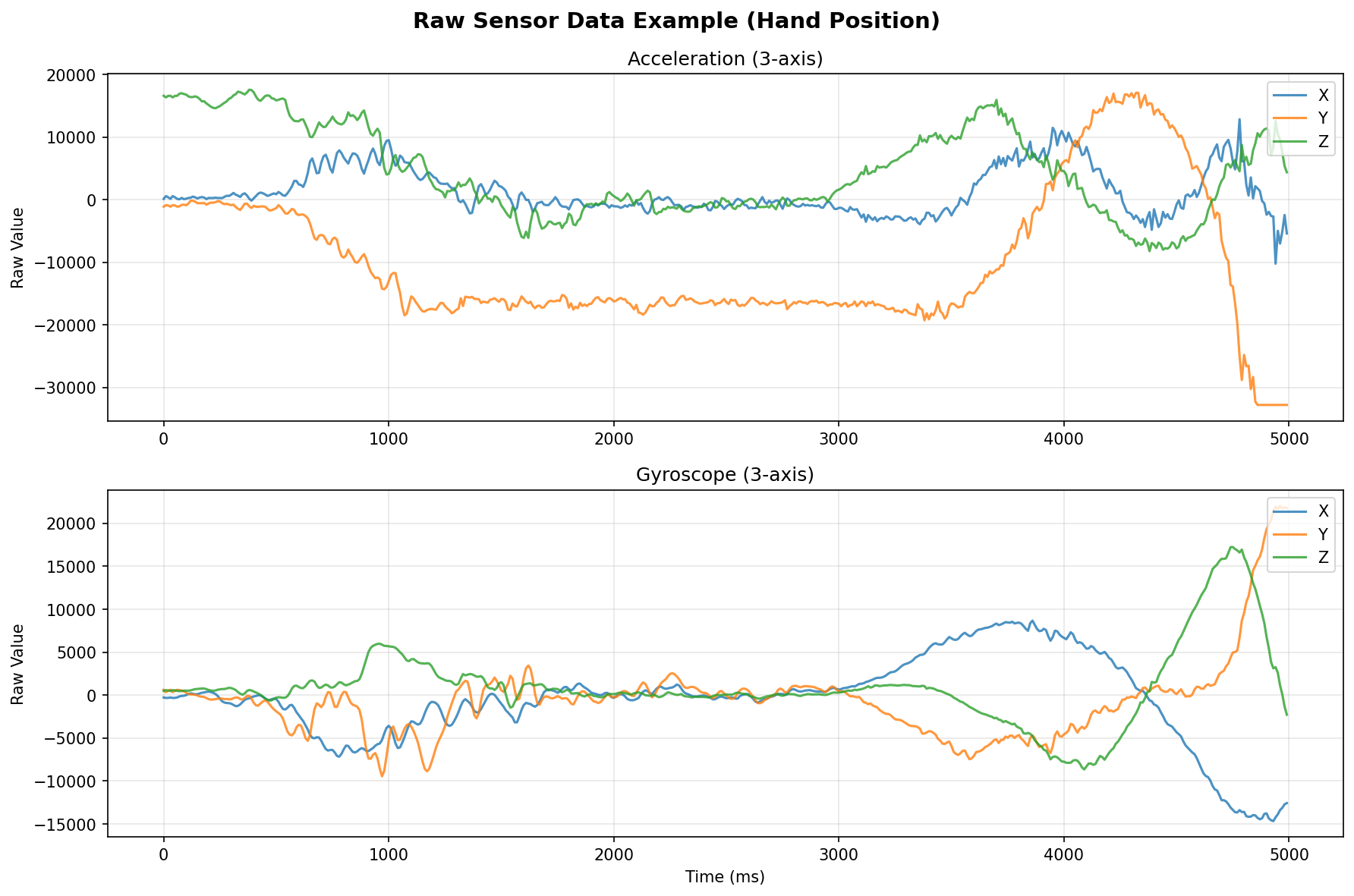
- 上半部分:加速度计输出(X/Y/Z 三轴)
- 下半部分:陀螺仪输出(X/Y/Z 三轴)
可以看到信号变化明显,说明传感器成功捕捉到了手部运动。
运动强度检测
我们计算了每个时刻的"运动强度"(三轴加速度的合成值),并检测运动开始的时刻:
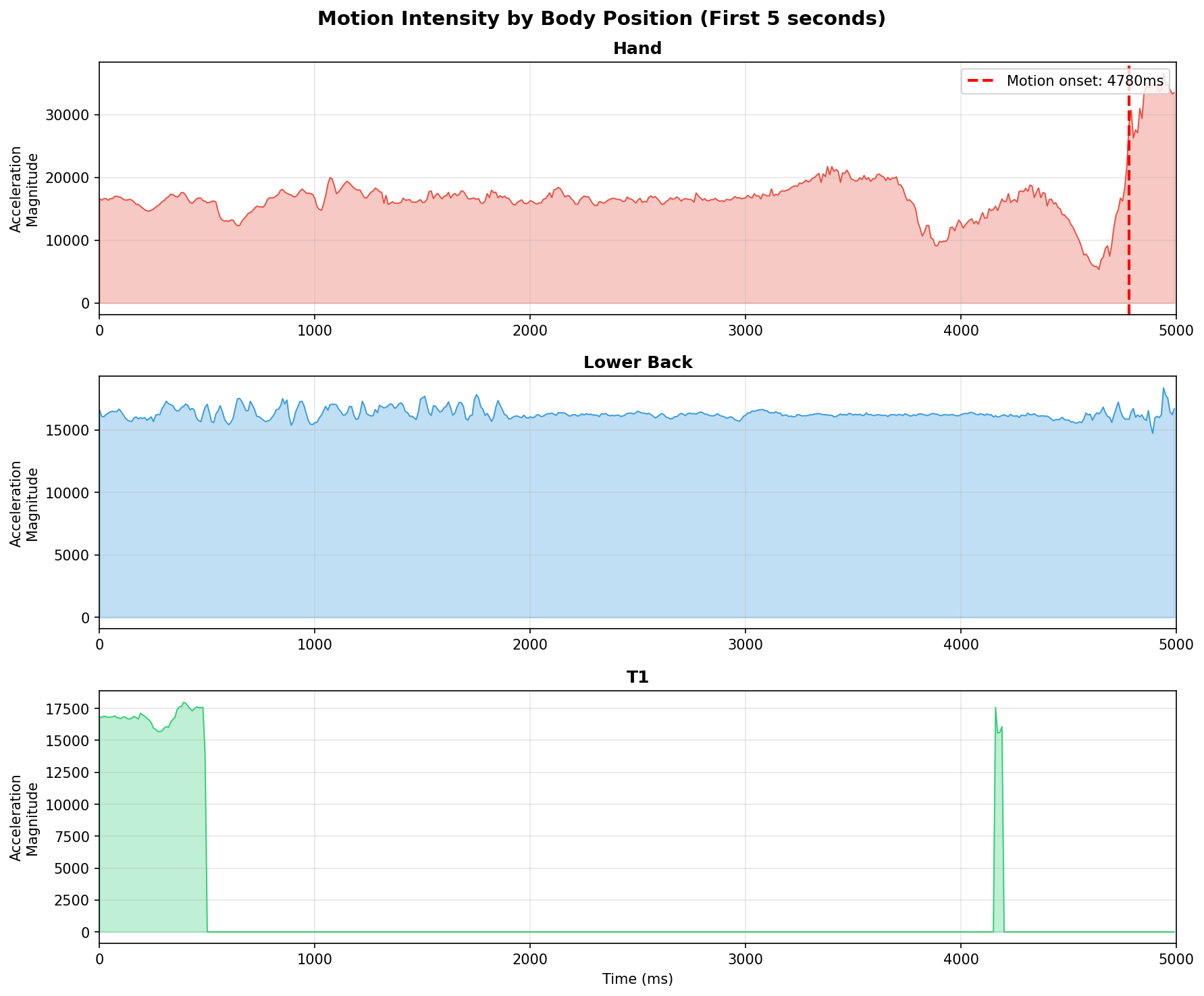
- 红色虚线:算法检测到的"运动开始"时刻
- 手部数据在约 2.9 秒时检测到明显运动
验证结果
✅ 传感器能用
三个位置都成功捕捉到了清晰的运动信号。
✅ 算法能跑
编写的检测程序 (early_foresee_prototype.py) 实现了:
- 运动检测 —— 判断"什么时候开始动了"
- 顺序比较 —— 比较不同位置的启动时间
检测结果示例
Hand (手部):
运动开始时刻: 2882ms
峰值强度: 47,169
程序输出:
⚠️ 检测到运动信号
✅ 算法成功识别运动开始点下一步挑战:时间同步
目前的数据是分三次独立采集的:
| 位置 | 录制日期 | 录制时间 |
|---|---|---|
| 手部 | 1月12日 | 17:15 |
| 下背 | 1月13日 | 23:28 |
| 上背 | 1月13日 | 23:58 |
这就像三个人赛跑,如果不是同时听到发令枪,就无法比较谁快谁慢。
结论:我们验证了"传感器能用"和"算法能算",但需要同步数据才能判断真实的发力顺序。
下一步计划
| 优先级 | 任务 | 说明 |
|---|---|---|
| P0 | 同步采集 | 让三个传感器"对表",同时记录同一次挥杆 |
| P1 | 扩大样本 | 采集 50+ 次挥杆,包含好的和坏的 |
| P2 | 智能模型 | 训练算法自动判断挥杆质量 |
结论
| 验证项 | 结果 |
|---|---|
| 传感器能检测运动吗? | ✅ 能,信号清晰 |
| 程序能比较顺序吗? | ✅ 能,逻辑正确 |
| 能实现提前预警吗? | ⏳ 需要同步数据验证 |
一句话总结:思路可行,等同步数据。
附录:技术细节
点击展开(供技术团队参考)
代码位置
/Users/xingyunx/workplace/golf/jan-23/
├── early_foresee_prototype.py # 检测程序
├── generate_visualizations.py # 图表生成
└── extracted/ # 传感器数据
├── imu_20260112_*.csv # 手部 (10 files)
├── imu_20260113_232*.csv # 下背 (4 files)
└── imu_20260113_235*.csv # 上背 (10 files)数据格式
csv
timestamp,AcX,AcY,AcZ,GyX,GyY,GyZ,Tmp
2026-01-13 23:28:22.232,604,16584,712,-734,2010,306,1355AcX/Y/Z:三轴加速度(原始 ADC 值)GyX/Y/Z:三轴角速度(原始 ADC 值)Tmp:温度
运动检测算法
python
def detect_motion_onset(magnitudes, threshold=1.5):
"""
检测运动开始时刻
1. 用前 20 个样本计算基线(静止状态)
2. 找到第一个超过 基线×1.5 的时刻
"""
baseline = mean(magnitudes[:20])
threshold = baseline * 1.5
for i, mag in enumerate(magnitudes):
if mag > threshold:
return i # 返回样本索引
return -1